Optical myography is a technique that visually inspects the human forearm to determine the hand posture. Hand posture is a communication element as important as the language itself. Human hand gesture delivers massive flow of information and can be used to design human-machine interfacing technologies, such as rehabilitation systems, haptic feedback systems, and robot-assisted surgeries.
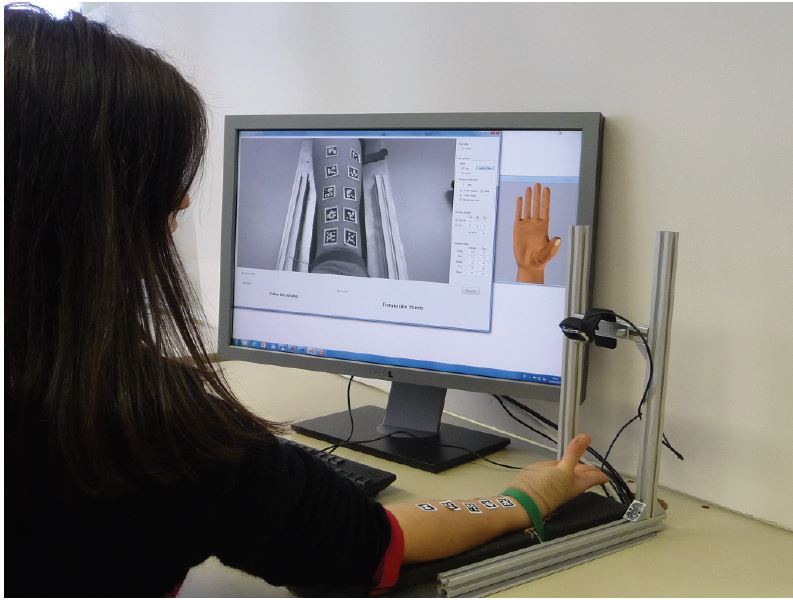
Figure 1. Data Acquisition while the subject follows the instruction on the monitor [1]
Force Myography
To find a more suitable technique for hand posture recognition and monitoring, scientists have developed a new method dubbed as myography. Apart from susceptibility to skin impedance, sudoresis and fatigue, force myography system is measured by tactile sensors. Moreover, this method allows tracking functional motor activity using volumetric changes associated with the muscle function. However, force myography system still requires precise sensing element positioning and might cause discomfort to users during and after usage. To address these drawbacks, technologists have invented another, more innovative hand monitoring technique called optical myography, which we discuss in this blog post.
Optical Myography System
Wu et al. [1] presented a simple optical myography system for hand posture recognition by monitoring visible area variable due to posture change. To demonstrate the new technique, they imaged five distinct postures with the wrist in neutral position under constant external conditions. During the experiment, the relationship between different postures and muscle activities on the forearm anterior surface between the wrist and the elbow was studied and surface was marked by lines to enclose the region of interest. Subsequently, intensity maps of region of interests were produced by computed algorithms and compared. Through this method, different postures can be distinguished from monitoring forearm visible area variations, which could be further applied for prostheses control.
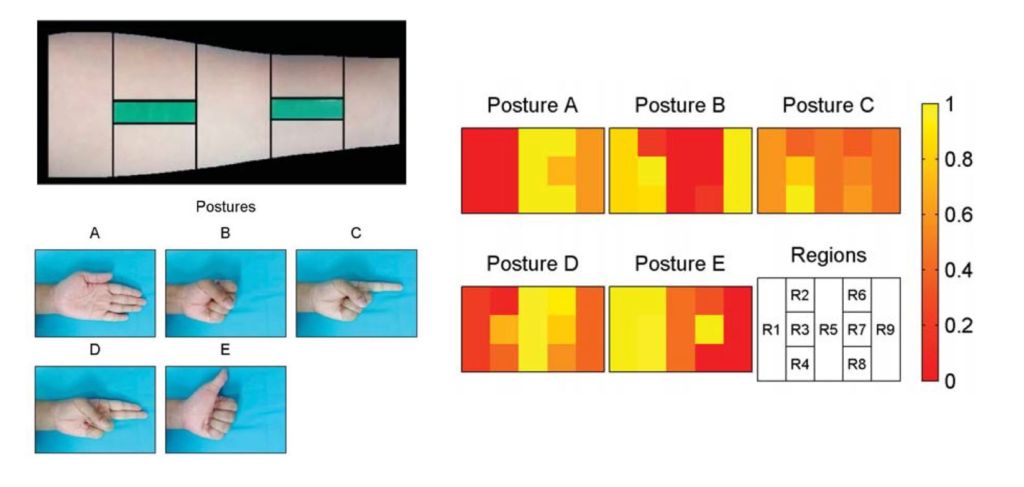
Figure 2. Anterior view of the forearm, with the region of interest segmented into nine smaller regions. When the posture sequence was in ADCB, there is a monotonic growth at region R1 and R3, monotonic decrease at R5 and R6, which could be resulted from the contraction of muscles flexor sublimis digitorum, flexor profundus digitorum, and wrist extensor carpiulnaris. Courtesy of Wu et al.
Optical fiber sensors are extensively applied in optical myography, due to their immunity to electromagnetic interference, high sensitivity, and multiplexing capability. Essentially, the optical myography signals can be measured by placing transducers in certain locations of the monitored muscles, and detecting optical signals due to force or strain change. In the following section, we will see how they designed such optical fiber sensors for use in optical myography (OMG).
Fiber Microbending Sensor used in Optical Myography
Since parameters for microbending can be represented in terms of applied force, it is reasonable to design transducers for pressing the fibers. The fiber microbending sensor for OMG is comprised of a pair of polymer plates with attached graphite rods. A silica multimode fiber is inserted into the polymer plates and is subjected to the applied force. The continuous light emitted by LED source is coupled into the multimode fibers using a micrometric actuator.
The schematic is shown in Figure 3 below. Transmitted light intensity is modulated by the microbending transducers and is detected by a CCD camera. Moreover, the external illumination effect is eliminated by dark environment and an additional reference fiber. When force is exerted onto the surface, the optical signal is processed. [3] The results of their experiments clearly demonstrated that the intensity of the transmitted by the fibers light decreases linearly as the applied on the sensor force increases.
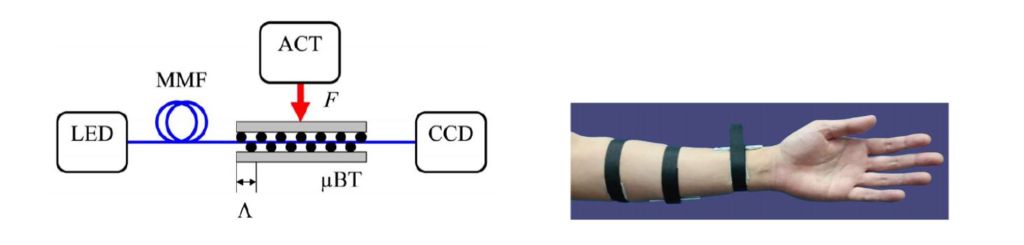
Figure 3. Left: Schematic of fiber microbending transducer. LED: light source; MMF: multimode fiber; ACT: micrometric actuator; F: applied force; : microbending transducer with periodicity ; CCD: camera. [4] Right: Image of the sensors attached to user forearm.
Fiber Grating Sensor
Fiber grating sensor uses the principle of long-period fiber grating (LPFG) which modulates the refractive index periodically, by photo-elastic effect at a specific wavelength. The single-mode fiber is placed between a pair of glass plates in the long-period fiber grating transducer. A series of graphite rods is attached to the interior side of one of the plates, as shown in the schematic, Figure 4 above. The system contains a micrometric actuator, a broadband source, and an optical spectrum analyzer. The force acting on the sensor can adjust the angle between the fiber and the rods, which results in a change of grating periodicity, that is subsequently picked up by the analyzer.
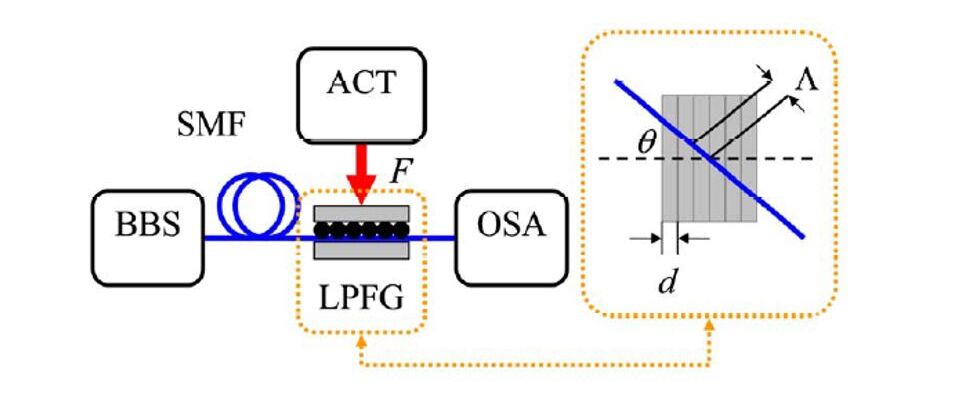
Figure 4. Schematic of the mechanically-induced LPFG transducer. BBS: broadband sensor; SMF: single mode fiber; OSA: optical spectrum analyzer. The inset shows the grating structure: the fiber (blue) is pressed by the graphite rods (grey) with an inclination angle , generating a periodicity, [4]
Conclusion
Optical fiber sensors are a promising technology offering a high performance for the identification of hand postures. With a modest cost and ability to attain direct information, optical fiber sensors are a potential alternative for the assessment of myographic signals. [5] Moreover, when measuring the mechanical stimuli produced by the forearm muscles, robustness, complexity of interrogation technique, and real-time response are important factors to be taken into consideration. When these factors reach a high-level of standard, the next step for a successful application of optical fiber sensors for commanding physical prosthetic hands will become a possibility.
Further Reading
[1] C. Nissler, N. Mouriki, C. Castellini, V. Belagiannis and N. Navab, “OMG: Introducing optical myography as a new human machine interface for hand amputees,” 2015 IEEE International Conference on Rehabilitation Robotics (ICORR), Singapore, 2015, pp. 937-942.
[2] Y. T. Wu, E. Fujiwara and C. K. Suzuki, “Optical myography system for posture monitoring,” 2016 IEEE International Symposium on Consumer Electronics (ISCE), Sao Paulo, 2016, pp. 37-38.
[3] E. Fujiwara and C.K. Suzuki, “Optical fiber force myography sensor for identification of hand postures,” J. Sensors, vol. 2018, pp. 8940373:1-10, Mar. 2018.
[4] E. Fujwara et al., “Design and Application of Optical Fiber Sensors for Force Myography,” 2018 SBFoton International Optics and Photonics Conference (SBFoton IOPC), Campinas, Brazil, 2018, pp. 1-5.
[5] S.A. Dalley, H.A. Varol, and M. Goldfarb, “A method for the control of multigrasp myoelectric prosthetic hands,” IEEE Trans. Neur. Syst. Reh., vol. 20, pp. 58-67, Jan. 2012.